-

济南振驰自动化科技有限公司
主营:山东变频器,山东变频器维修,变频器销售

济南振驰自动化科技有限公司
主营:山东变频器,山东变频器维修,变频器销售 18
18

ABB ACS510/ACS550 启动数据:
Group 99: 起动数据配置:
9902 APPLIC MACRO ( 应用宏 )
选择应用宏。应用宏自动设置参数,使 ACS550 得以完成某些特定的应用。
9904 MOTOR CTRL MODE ( 电机控制模式 )
选择电机控制模式。
1 = 速度控制, 无传感器矢量控制模式。
给定 1 以 rpm 为速度给定单位。
给定 2 以 % 为速度给定单位。 (** 是速度,等于参数 2002 MAXIMUM SPEED 的值,或者等于 2001
MINIMUM SPEED 如果小速度的值大于速度 )。
2 = 转矩控制
给定 1 是以 rpm 为速度给定单位
给定 2 是以 % (** 额定转矩 ) 为转矩给定单位
3 = SCALAR CONTROL ( 标量控制 ) - 标量控制模式
给定 1 以 Hz 为速度给定单位。
给定 2 以 % 为速度给定单位。 (** 是速度,等于参数 2002 MAXIMUM SPEED 的值,或者等于 2001
MINIMUM SPEED 如果小速度的值大于速度 )。
9905 MOTOR NOM VOLT ( 电机额定电压 )
定义电机额定电压。
必须等于电机铭牌上的值。
设定了输出到电机的电压值。
ACS550 输出到电机的电压无法大于电源电压。
9906 MOTOR NOM CURR ( 电机额定电流 )
定义电机额定电流。
必须等于电机铭牌上的值。
允许范围: (0.2...2.0) *I N ( I N 为变频器电流 )。
9907 MOTOR NOM FREQ ( 电机额定频率 )
定义电机额定频率 ( 弱磁点 )。
范围: 10...500 Hz ( 通常是 50 或 60 Hz)
设定频率点,使得变频器输出电压在该点时等于电机额定电压。
9908 MOTOR NOM SPEED (电机额定转速)
定义电机额定转速。
必须等于电机铭牌上的值。
9909 MOTOR NOM POWER (电机额定功率)
定义电机额定功率。
必须等于电机铭牌上的值。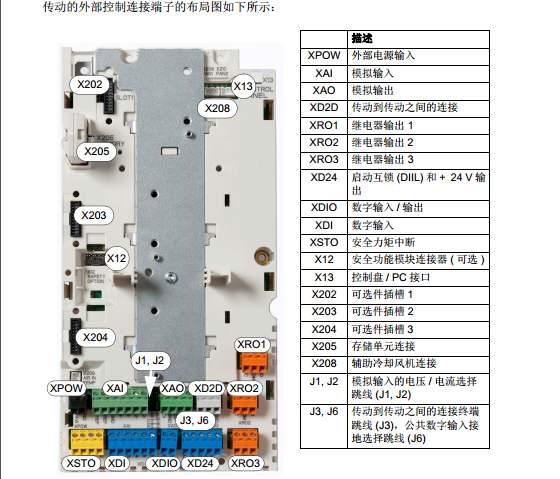
ABB ACS550/ACS510变频器PID控制参数:
99.02=6;
40.10=19;
40.11=x%;压力设定值;
40.16=0;AI1.
4016=1;AI2
Group 40: PID 控制 1
这组参数定义了变频器的一种 PID 控制模式。在 PID 控制模式中,变频器根据比较
给定值 ( 设定的 ) 和实际值 ( 反馈的 ),自动调整输出速度。两种信号的差值称作偏差
值。
三组参数定义了 PID 控制:
Group 40 PID 控制 1 定义了过程 PID 控制 1。通常都使用这组参数。
Group 41 PID 控制 2 定义了过程 PID 控制 2。
除了 PID 参数组选择 (4027) 外,Group 40 和 41 的参数都是相同的。
Group 42 外部 / 修正 PID 定义 :
– 一种外部 PID 控制参数或者
– 速度 / 频率给定的修正参数。
代码 描述
4001 GAIN ( 增益 )
该参数定义 PID 增益。
可调范围 0.1... 100。
如果增益值取 0.1, PID 调节器输出变化为十分之一的偏差值。
如果增益值取 100, PID 调节器输出变化为一百倍的偏差值。
4002 INTEGRATION TIME ( 积分时间 )
PID 调节器积分时间。
积分时间,定义是,偏差引起输出增长的时间。
偏差恒定且为 **。
增益 = 1。
积分时间设为 1 秒,则输出变化 ** 所需时间为 1 秒。
0.0 = NOT SEL ( 不选择 ) – 关闭积分部分 ( 调节器的 I- 部分 )。
0.1…600.0 = 积分时间 ( 秒 )。
4003 DERIVATION TIME ( 微分时间 )
PID 调节器微分时间。
允许在 PID 调节器上叠加一个偏差的微分值。微分值是偏差值
的变化率。例如,如果输入偏差值线性变化,则在调节器输出
侧叠加一个恒定的调节量。
微分环节有一单极性滤波器,时间常数由参数 4004 PID DERIV
FILTER 定义。
0.0 = NOT SEL ( 不选择 ) – 关闭调节器的微分部分。
0.1…10.0 = 微分时间 ( 秒 )。
t
P 4002
A
C (P 4001 = 1)
B
A = 偏差值
B = 停止后的偏差值
C = 增益为 1 时的调节器输出
D = 增益为 10 时的调节器输出
D (P 4001 = 10)
t
**
增益
过程偏差值
P 4003
调节器的 D- 部分
PID 输出
偏差
t
0%
P 401
91 ACS550 用户手册
起动
4004 PID DERIV FILTER ( 微分滤波 )
PID 调节器微分滤波时间常数。
偏差微分值在叠加到 PID 调节器输出之前,先经过一个单极性滤波器。
增大时间常数可以使微分量的调节变得平缓,抑止干扰。
0.0 = NOT SEL – ( 不选择 ) – 关闭微分滤波部分。
0.1…10.0 = 滤波时间常数 ( 秒 )。
4005 ERROR VALUE INV ( 偏差值取反 )
选择反馈信号和变频器速度之间是正常还是取反关系。
0 = NO – 正常,反馈信号减小时,引起电机转速上升。偏差 = 给定 - 反馈
1 = YES – 取反, 反馈信号减小时,引起电机转速下降。偏差 = 反馈 - 给定
4006 UNIT ( 单位 )
选择 PID 调节器实际值的单位。 (PID1 参数 0128, 0130, 和 0132)。
参见参数 3405 列出的所有有效单位。
4007 DSP FORMAT ( 显示格式 )
定义 PID 调节器实际值小数点的位置。
输入的数字表明小数点右边的数字个数。
参见表中以圆周率 pi (3.14159) 示例。
4008 0 % VALUE (0% 值 )
和下一参数一起定义 PID 调节器实际值的比例换算 (PID1 参数
0128, 0130, 和 0132)。
参数 4006 和 4007 定义了单位和比例换算。
4009 100 % VALUE (** 值 )
和上一参数一起定义 PID 调节器实际值的比例换算 (PID1 参数
0128, 0130, 和 0132)。
参数 4006 和 4007 定义了单位和比例换算。
4010 SET POINT SEL ( 给定值选择 )
定义 PID 调节器的给定值。
当 PID 调节器旁路时 ( 参数 8121 REG BYPASS CTRL ),该参数无意义。
0 = keypad – 控制盘作为给定。
1 = AI 1 – 模拟输入 1 作为给定。
2 = AI 2 – 模拟输入 2 作为给定。
8 = comm – 现场总线作为给定。
9 = COMM + AI 1 – 现场总线和模拟输入 1 ( AI 1) 的和作为给定。参见下述模拟输入给定校正。
10 = COMM * AI 1 – 现场总线和模拟输入 1 ( AI 1) 的乘积作为给定。参见下述模拟输入给定校正。
11 = DI 3 U , 4 D ( RNC ) – 电动电位器式的数字输入作为给定。
DI 3 增加给定 ( U 表示 “增加”)
DI 4 减少给定 ( D 表示 “减小”)
参数 2205 ACCELER TIME 2 决定给定值的变化率。
R = 停车后,给定复位到零。
NC = 给定值不复制。
12 = DI 3 U , 4 D ( NC ) – 和上述 DI 3 U , 4 D ( RNC ) 基本相同,除了:
接到停止信号时给定值不复位为 0。给定值被存储起来。变频器重新起动后,电机将按相应的曲线加速到原来记
忆的速度。
13 = DI 5 U , 6 D ( NC ) – 和上述 DI 3 U , 4 D ( NC ) 基本相同,除了:
使用数字输入口 DI 5 和 DI 6。
14 = AI 1 + AI 2 – 模拟输入 1 ( AI 1) 和模拟输入 2 ( AI 2) 的和作为给定。参见下述模拟输入给定校正。
15 = AI 1 * AI 2 – 模拟输入 1 ( AI 1) 和模拟输入 2 ( AI 2) 的乘积作为给定。参见下述模拟输入给定校正。
16 = AI 1 - AI 2 – 模拟输入 1 ( AI 1) 和模拟输入 2 ( AI 2) 的差作为给定。参见下述模拟输入给定校正。
17 = AI 1/ AI 2 – 模拟输入 1 ( AI 1) 和模拟输入 2 ( AI 2) 的商作为给定。参见下述模拟输入给定校正。
19 = INTERNAL ( 内部 )– 给定值是恒定的,由参数 4011 INTERNAL SETPNT 设定。
码 代码 描述
4007 值
输入 显示
内部比例换算 (%)
** 0%
单位 (P4006)
比例换算 (P4007)
ACS550 用户手册 92
起动
模拟输入给定校正
参数值 9, 10, 和 14…17 使用下表中的公式:
在这里:
C = 主给定值
( = COMM 在值 9, 10 而
= AI 1 在值 14...17)。
B = 校正给定
( = AI 1 在值 9, 10 而
= AI 2 在值 14...17)。
示例 :
表格显示了在值设定为 9, 10, 和 14…17 时,给定值
的曲线。在这里:
C = 25%.
P 4012 SETPOINT MIN = 0。
P 4013 SETPOINT MAX = 0。
B 随着水平轴变化而变化。
4011 INTERNAL SETPNT ( 内部给定 )
为 PID 调节器设置一个恒定的给定值。
参数 4006 和 4007 定义了单位和比例换算。
4012 SETPOINT MIN ( 给定小值 )
设定给定信号的小值。参见参数 4010。
4013 SETPOINT MAX ( 给定值 )
设定给定信号的值。参见参数 4010。
4014 FBK SEL ( 反馈值选择 )
定义 PID 调节器的反馈信号 ( 实际信号 )。
反馈信号可以是两个实际信号 ACT1 和 ACT2 的组合。
实际值 1( ACT 1) 的信号源由参数 4016 定义。
实际值 2 ( ACT 2) 的信号源由参数 4017 定义。
1 = ACT 1 – 选择实际值 1ACT1 为反馈信号。
2 = ACT 1- ACT 2 – 选择 ACT1 与 ACT2 的差为反馈信号。
3 = ACT 1+ ACT 2 – 选择 ACT1 与 ACT2 的和为反馈信号。
4 = ACT 1* ACT 2 – 选择 ACT1 与 ACT2 的积为反馈信号。
5 = ACT 1/ ACT 2 – 选择 ACT1 与 ACT2 的商为反馈信号。
6 = MIN ( A 1, A 2) – 选择 ACT1 与 ACT2 中较小者为反馈信号。
7 = MAX ( A 1, A 2) – 选择 ACT1 与 ACT2 中较大者为反馈信号。
8 = SQRT ( A 1- A 2) – 选择 ACT1 与 ACT2 的差的平方根为反馈信号。
9 = SQA 1 + SQA 2 – 选择 ACT1 与 ACT2 的平方根的和为反馈信号。
4015 FBK MULTIPLIER ( 反馈乘法因子 )
定义一个额外的乘法因子,这个乘法因子用于通过参数 4014 选择的 PID 反馈信号上。
主要用于一些通过压差计算流量的应用场合。
0 = NOT USED ( 未使用 )。
-32768…32767 = 乘法因子用于通过参数 4014 FBK SEL 选择的 PID 反馈信号上。
示例 :
代码 描述
设定值
AI 按下面公式计算
C + B C 值 + (B 值 - 50% 的给定值 )
C * B C 值 * (B 值 / 50% 的给定值 )
C - B (C 值 + 50% 的给定值 ) - B 值
C / B (C 值 * 50% 的给定值 ) / B 值
FBK Multiplier A1 A2 ∠ × =
93 ACS550 用户手册
起动
4016 ACT1 INPUT (ACT1 输入 )
定义实际值 1 ( ACT 1) 的信号源。
0 = AI 1 – 取 AI1 为 ACT1。
1 = AI 2 – 取 AI2 为 ACT1。
2 = Current( 电流 ) – 使用电流值作为 ACT 1,这样:
Min ACT 1 = 0 电流
Max ACT 1 = 2 x 额定电流
3 = Torque( 转矩 ) – 使用转矩值作为 ACT 1,这样:
Min ACT 1 = -2 x 额定转矩
Max ACT 1 = 2 x 额定转矩
4 = Power( 功率 ) – 使用功率值作为 ACT 1,这样:
Min ACT 1 = -2 x 额定功率
Max ACT 1 = 2 x 额定功率
ABB ACS550/ACS51**记录:
Group 04: 故障记录
0401 LAST FAULT (后故障)
0 = 清除故障记录 ( 显示 = 无故障记录 )。
n = 近一次故障记录的故障代码。
0402 FAULT TIME 1 (故障时间 1 )
近故障发生的日期。会是:
日期 - 如果实时时钟在运行。
上电后的天数 - 如果实时时钟没有使用,或没有设置。
0403 FAULT TIME 2 (故障时间 2 )
近故障发生的时间。会是:
实际时间 , 格式为:小时:分钟:滴答 - 如果实时时钟在运行。
上电后的时间 ( 小于参数 0402 中的整天 ),格式为:小时:分钟:滴答 - 如果实时时钟没有使用,或没有设置。
0404 SPEED AT FLT (故障时转速)
在后故障发生时的电机转速 (rpm)。
0405 FREQ AT FLT (故障时频率)
在后故障发生时的电机频率 (Hz)。
0406 VOLTAGE AT FLT (故障时电压)
在后故障发生时的直流电压 (V)。
0407 CURRENT AT FLT ( 故障时电流)
在后故障发生时的电机电流 (A)。
0408 TORQUE AT FLT (故障时转矩)
在后故障发生时的电机转矩 (%)。
0409 STATUS AT FLT (故障时状态)
在后故障发生时的变频器状态 (以十六进制表示)。
0410 DI1-3 AT FLT (故障时 DI1-DI3 )
在后故障发生时的数字输入口 1…3 的状态。
0411 DI4-6 AT FLT (故障时 DI4-DI6 )
在后故障发生时的数字输入口 4…6 的状态。
0412 PREVIOUS FAULT 1 (早期故障 1 )
倒数*二次故障的故障代码。
0413 PREVIOUS FAULT 2 (早期故障 2 )
倒数*三次故障的故障代码。
ABB ACS510/ACS550模拟量输入:
Group 13: 模拟输入
这组参数定义了模拟输入的限幅值和滤波时间。
代码 描述
1301 MINIMUM AI1 (AI1 低限 )
设置 AI1 的低限。
定义该值为模拟信号的百分比。参见下面的例子。
小模拟输入信号对应参数 1104 REF 1 MIN 或 1107 REF 2 MIN 。
AI 低限不能大于 AI 高限。
这些参数 ( 给定和模拟量输入信号的小值设定 ) 实现了给定值的比例换算和偏移。
参见参数 1104 中的图示。
示例: 将 AI 的小值设为 4 mA:
设定模拟输入为 4...20 mA 电流信号。
计算低限 (4 mA) 作为高限 (20 mA) 的百分比 = 4 mA / 20 mA * ** = 20%
1302 MAXIMUM AI1 (AI1 高限 )
设置 AI1 的高限。
定义该值为模拟信号的百分比。
模拟输入信号对应参数 1105 REF 1 MAX 或 1108 REF 2 MAX 。
参见参数 1104 中的图示。
1303 FILTER AI1 (AI1 滤波时间 )
定义 AI1 滤波时间常数。
在该参数定义的时间内,滤波后的信号达到阶跃变化的 63%。
1304 MINIMUM AI2 (AI2 低限 )
设置 AI2 的低限。
参见上述 AI 1 低限。
1305 MAXIMUM AI2 (AI2 高限 )
设置 AI2 的高限。
参见上述 AI 1 高限。
1306 FILTER AI2 (AI2 滤波时间 )
定义 AI2 滤波时间常数。
参见上述 AI 1 滤波时间。
http://jndh.cn.b2b168.com
欢迎来到济南振驰自动化科技有限公司网站, 具体地址是山东省济南槐荫区党杨路腊山南苑2区13-2,联系人是张彬。
主要经营济南振驰自动化科技有限公司是一家专业从事变频器维修和销售的**公司。公司主要维修品牌:变频器类有ABB,西门子,施耐德,三菱,三垦,富士,AB,安川,台达,伟肯,丹佛斯,艾默生,汇川,英威腾,康沃,海利普,欧瑞,伟创等;直流调速器类有ABB,西门子,施耐德,欧陆等;软启动器类有ABB,西门子,施耐德等。欢迎来电咨询!。
单位注册资金未知。
价格战,是很多行业都有过的恶性竞争,不少厂家为了在价格战役中获胜,不惜以牺牲产品质量为代价,而我们公司坚决杜绝价格战,坚持用优质的原材料及先进的技术确保产品质量,确保消费者的合法利益。